
Week 2 was a shorter week as it was Labor Day on Monday. However, we went full on with experimenting with the bHaptic gloves and revisited our design sprint board during summer to come up with ways to categorize haptic patterns for our next step of primitive haptic patterns to test with.
Understanding Haptics
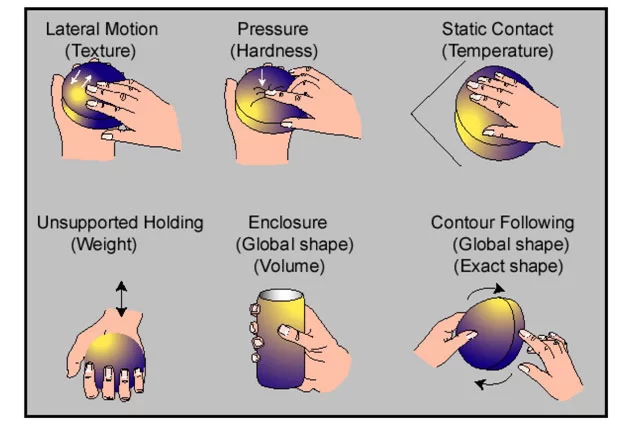
Vivian, our faculty advisor, shared with us common parameters to do categorize haptics sensation and gestures. This helped us come up with the language to talk about designing the exact haptic patterns.
- texture (x/y translation, also known as lateral motion),
- compliance (z translation, also known as hardness/pressure),
- contact,
- haptic animations (like notifications)
Psychology textbook
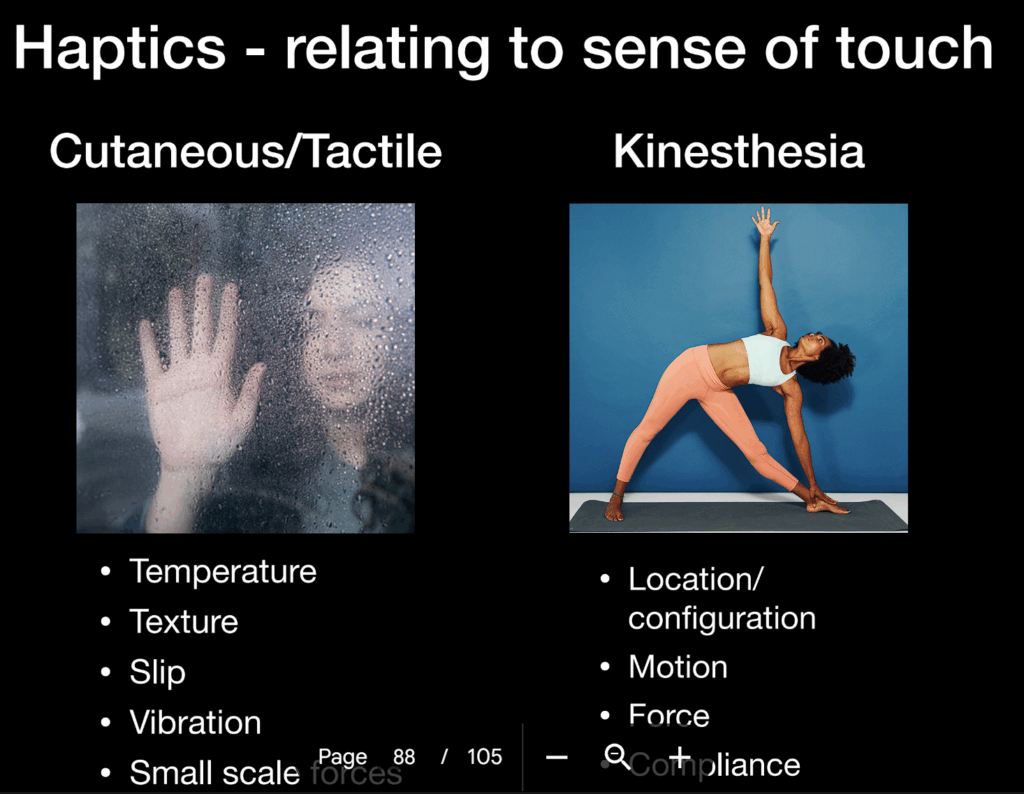
We read a chapter for Touch from a psychology textbook on Perception. In that, we learned that
- Human temporal sensitivity (5ms) is better than vision (25ms) but worse than audio (0.01ms)
- Intermodal feelings with other senses either: compete for brain’s attention, or complement to build up 1 representation.
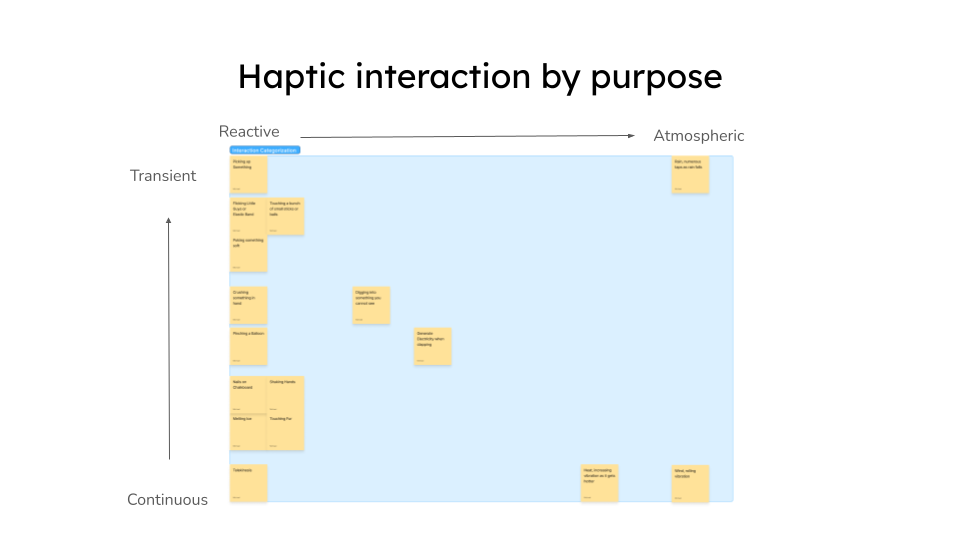
Recategorizing our design sprint by haptic parameters
Revisiting our design sprint ideas, we categorized the ideas we had with parameters such as location (whole hand vs. single point), duration (transient vs. sustained/continuous), and by purpose (reactive or atmospheric).

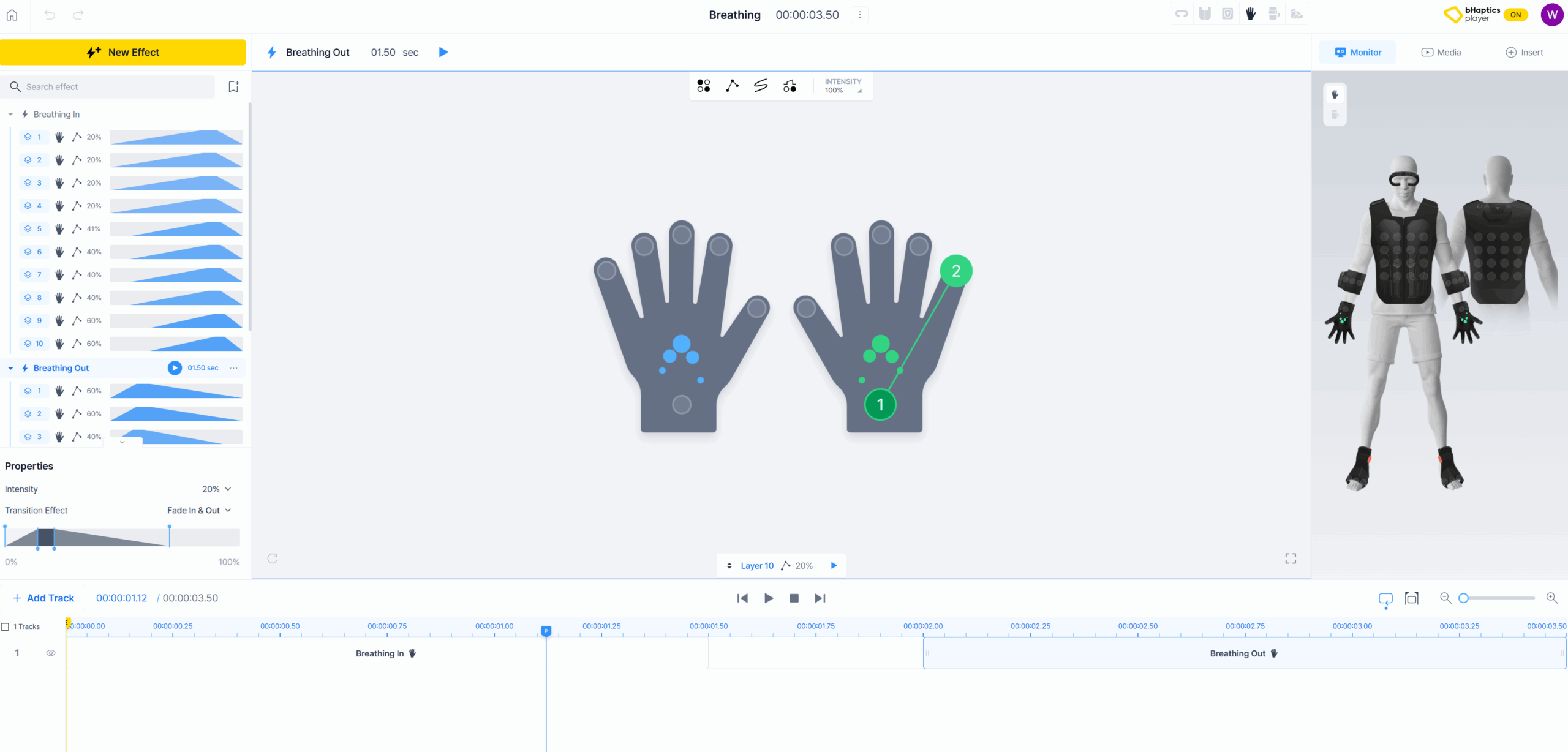
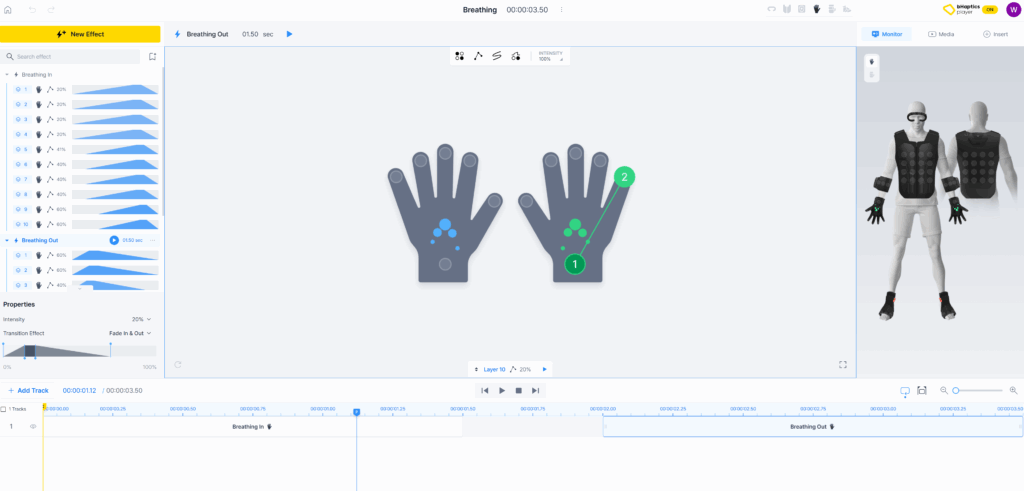
Playing with bHaptics Designer interface
Everyone was excited to see the bHaptics Designer as it is very intuitive to work with. We were able to add haptic patterns in four ways: single actuator point activation, path drawing by defining discrete points on the hand to travel through, an actual path drawn on the hand, and waveform (wave frequency design) for even more fine-tuned vibration patterns beyond intensity on chosen actuators.
Limitations we found were:
- 0 -> 1% is a huge jump of sensation feedback and it is hard to create very subtle vibrations.
- Of course still no force feedback and temperature.
Gold spike design
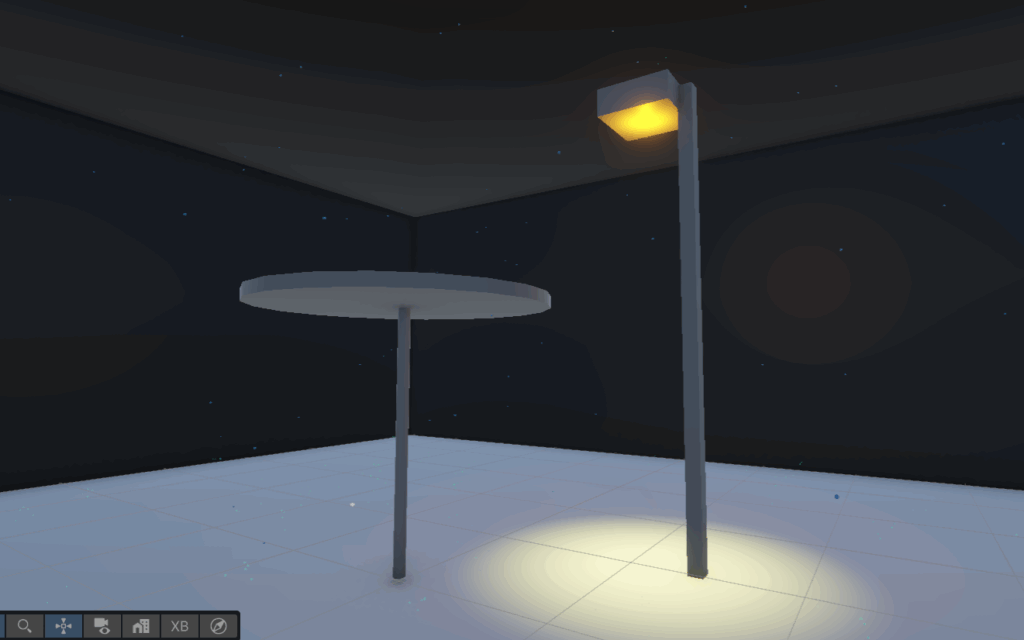
In addition to the three initial proof of concept prototypes, touch grass, telekinesis, and elastic band, we decided to make a rain catching scene to explore how well single point rapid whole hand low-intensity sensations work in VR if we set the contexts well enough as a gold spike of our subsequent prototypes.
Design considerations:
- Because rain is usually a whole body experience, we limit players under an umbrella so only their hands can go out and interact with the rain.
- We wanted to create the emotion of feeling alone, just as a rainy city street in the night. We therefore created a single lamp for atmosphere.
- Also to create atmosphere, we added music that Michael composed recreating a city street that might have a jazz bar.
reference city rain scene
Next steps
Week three is quarter walkarounds, a time for teams to realign vision to present a research and plan for faculty and community in general.